Optimal (Wiener) Filtering with the FFT
Introduction
There are a number of tasks in numerical processing that are routinely handled with Fourier techniques. One of these is filtering for the removal of noise from a “corrupted” signal1.
Let’s prepare an image to our experiments. We start with uncorrupted signal $u(t)$. We can take the following image, 512px*512px, as an example:

|
| Pic.1. Original image, $u(t)$ |
First, the apparatus may not have a perfect “delta-function” response, so that the true signal $u(t)$ is convolved with (smeared out by) some known response function $r(t)$ to give a smeared signal $s(t)$,
\begin{equation} s(t) = \int_{-\infty}^\infty r(t-\tau)u(\tau)d\tau \label{eq:st} \end{equation} or \begin{equation} S(f) = R(f)U(f) \label{eq:Sf} \end{equation} where $S,R,U$ are the Fourier transforms of $s,r,u$ respectively.
Let us use the Gaussian distribution as the response function, and, to be more specific, use 2 dimensions $t_1$ and $t_2$ for $t$: \begin{equation} r(t_1,t_2) = \frac{e^{-(t_1^2 + t_2^2)/a^2}}{a^2\pi}, \quad a=0.2 \label{eq:rt} \end{equation}
Use Imagemagick to perform this task:
convert 5.3.02.png -gaussian-blur 0x2 5.3.02.gaus.png
Note than you may need to rebuild it to use it’s HDRI feature:
sudo apt-get install fftw-dev libjpeg62-dev
sudo apt-get install libfftw3-3 libfftw3-dev
apt-get source imagemagick
cd im*
./configure --enable-hdri --with-jp2=yes --with-jpeg=yes --with-lqr --with-fftw=yes
make install
sudo ldconfig /usr/local/lib
|
| Pic.2. Smeared image, $s(t)$ |
Second, the measured signal may contain an additional component of noise $n(t)$. So the result, currupted signal $c(t)$, contains the following two components: \begin{equation} c(t) = s(t) + n(t) \label{eq:ct} \end{equation}
Add a Perlin noise by running a Perlin-noise generator:
perlin 512x512 -n poisson -a 2 noise.png

|
| Pic.3. Noise, $n(t)$ |
To get the result use the Imagemagick’s special composition method:
convert noise.png -normalize +level 30,70% noise.30-70.png
convert 5.3.02.gaus.png noise.30-70.png -compose Mathematics -define compose:args='0,1,1,-0.5' -composite 5.3.02.corrupt.png

|
| Pic.4. Corrupted image, $c(t) = s(t) + n(t)$ |
We’ve done with the image preparation. Now let’s get deep into some formulas.
Fourier transform
A physical process can be described either in the time domain, by the values of some quantity $h$ as a function of time $t$, e.g., $h(t)$, or else in the frequency domain, where the process is specified by giving its amplitude $H$ (a complex number indicating phase also), as a function of frequency $f$, that is $H(f)$, with $-\infty < f < \infty$. For many purposes it is useful to think of $h(t)$ and $H(f)$ as being two different representations of the same function. One goes back and forth between these two representations by means of the Fourier transform equations,
We estimate the Fourier transform of a function from a finite number of its sampled points. Suppose that we have $N$ consecutive sampled values \begin{equation} h_k \equiv h(t_k), \qquad t_k \equiv k\Delta, \qquad k = 0, 1, 2, \ldots, N − 1 \label{eq:h_k} \end{equation} Here $k$ represents coordinates $(k_1,k_2)$ on the image, $k_1 \in [0..511]$, $k_2 \in [0..511]$, and $h_k$ – image brightness at these points. $\Delta$ is a “one pixel” interval.
As you see we are not dealing with the exactly time domain, instead we treat image as a signal, parameterized with 2-dimentional parameter $t = (t_1,t_2)$.
In this case the representation of this signal in frequency domain, discrete Fourier transform of the $N$ points $h_k$, will be \begin{equation} H_n \equiv \sum_{k=0}^{N-1}h_ke^{2\pi ikn/N} \label{eq:four_H_n} \end{equation}
The formula for the discrete inverse Fourier transform, which recovers the set of $h_k$’s from the $H_n$’s is: \begin{equation} h_k = \frac{1}{N} \sum_{k=0}^{N-1}H_ne^{-2\pi ikn/N} \label{eq:four_h_k} \end{equation}
Now get back to our problem.
Optimal filter
To deconvolve the effects of the response function $r$ \eqref{eq:rt} and when noise \eqref{eq:ct} is present, we have to find the optimal filter, $\phi(t)$ or $\Phi(f)$, which, when applied to the measured signal $c(t)$ or $C(f)$, and then deconvolved by $r(t)$ or $R(f)$, produces a signal $\widetilde{u}(t)$ or $\widetilde{U}(f)$ that is as close as possible to the uncorrupted signal $u(t)$ or $U(f)$, see \eqref{eq:Sf}. In other words we will estimate the true signal $U$ by \begin{equation} \widetilde{U}(f) = \frac{C(f)\Phi(f)}{R(f)} \label{eq:Uf} \end{equation}
To get the closest $\widetilde{U}$ to $U$, we ask in this example that they would be close in the least-square sense \begin{equation} \int_{-\infty}^{\infty}|\widetilde{u}(f)-u(f)|^2dt = \int_{-\infty}^{\infty}|\widetilde{U}(f)-U(f)|^2df \quad \text{is minimized.} \label{eq:Ufmin} \end{equation}
Substituting equations \eqref{eq:Uf} and \eqref{eq:ct}, the right-hand side of \eqref{eq:Ufmin} becomes
The signal $S$ and the noise $N$ are uncorrelated, so their cross product, when integrated over frequency f, gave zero. This is practically the definition of what we mean by noise.
The expression \eqref{eq:eq1} will be a minimum if and only if the integrand is minimized with respect to $\Phi(f)$ at every value of $f$. Let us search for such a solution where $\Phi(f)$ is a real function. Differentiating with respect to $\Phi$, and setting the result equal to zero gives \begin{equation} \Phi(f) = \frac{|S(f)|^2}{|S(f)|^2 + |N(f)|^2} \label{eq:Phidiff} \end{equation}
This is the formula for the optimal filter $\Phi(f)$.
Notice that equation \eqref{eq:Phidiff} involves $S$, the smeared signal, and $N$, the noise. The two of these add up to be $C$, the measured signal. Equation \eqref{eq:Phidiff} does not contain $U$, the “true” signal. This makes for an important simplification: The optimal filter can be determined independently of the determination of the deconvolution function that relates $S$ and $U$.
To determine the optimal filter from equation \eqref{eq:Phidiff} we need some way of separately estimating $|S|^2$ and $|N|^2$. There is no way to do this from the measured signal $C$ alone without some other information, or some assumption or guess.
We could obtain the extra information in the following way. For example, we can sample a long stretch of data $c(t)$ and plot its one-sided power spectral density (PSD) using equation \begin{equation} P_h(f) \equiv |H(f)|^2 + |H(-f)|^2 = 2|H(f)|^2 \qquad 0 \leq f < \infty, \quad h(t)\in\R \label{eq:PSD} \end{equation}
The relation between the discrete Fourier transform of a set of numbers and their continuous Fourier transform when they are viewed as samples of a continuous function sampled at an interval $\Delta$ can be rewritten as1
\begin{equation} H(f_n) \approx \Delta H_n \label{eq:approx_delta} \end{equation}
where $f_n$ is given by
\begin{equation} f_n \equiv \frac{n}{N\Delta}, \qquad n=-\frac{N}{2},\ldots,\frac{N}{2} \label{eq:fn} \end{equation}
Some more steps
to be arranged…
FFT transform with imagemagick
convert 5.3.02.corrupt.png -fft +depth \
\( -clone 0 -write magnitude.png +delete \) \
\( -clone 1 -write phase.png +delete \) \
null:
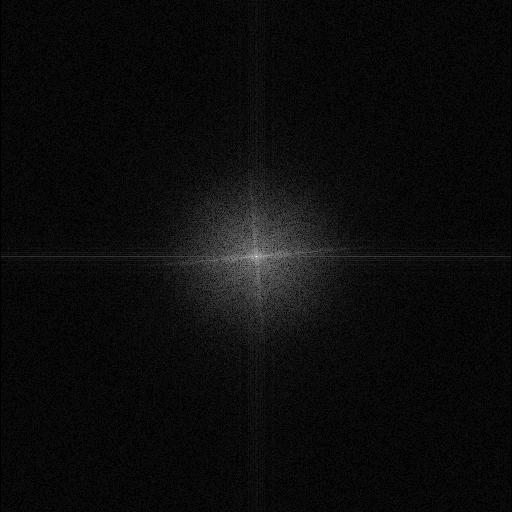
convert 5.3.02.corrupt.png -fft +depth \
\( -clone 0 -auto-level -evaluate log 10000 -write magnitude_log.png +delete \) \
\( -clone 1 -write phase.png +delete \) \
null:
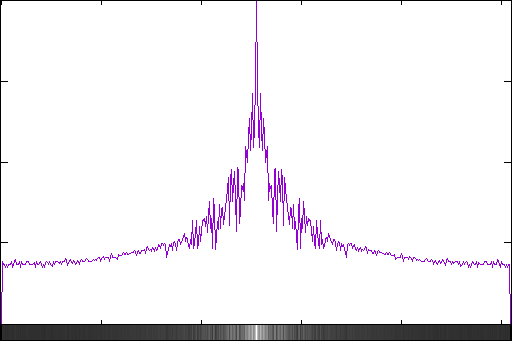
im_profile magnitude_log.png magnitude_log_profile.png
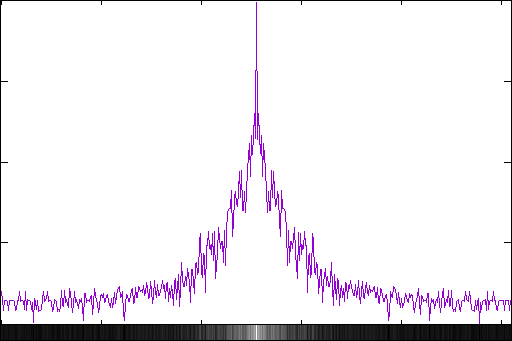
im_profile -v magnitude_log.png magnitude_log_profile_v.png

|
| Pic.5. FFT magnitude, mostly black with a single white dot in the middle |
|
| Pic.6. FFT magnitude log scale |
|
| Pic.7. Log magnitude profile |
|
| Pic.8. Log magnitude vertical profile |

|
| Pic.9. FFT phase |